ZLTECH Nema24 200/400W 24-48VDC encoder servo motor ສໍາລັບເຄື່ອງຫຍິບ




ຂໍ້ດີຂອງ DC Servo Motor
ມໍເຕີ servo DC ແຮງດັນຕໍ່າປະກອບດ້ວຍ stator, ແກນ rotor, shaft rotating motor, ເປັນ motor winding commutator, motor winding, ການວັດແທກຄວາມໄວ motor winding, ແລະ commutator motor ວັດຄວາມໄວ.ແກນ rotor ແມ່ນປະກອບດ້ວຍແຜ່ນສະແຕມເຫຼັກກ້າຊິລິໂຄນແລະມີການສ້ອມແຊມ superposition ເທິງ shaft rotating motor.ແຮງດັນຕ່ໍາ DC servo motor ມີລັກສະນະການຄວບຄຸມຄວາມໄວທີ່ດີ, ແຕ່ຍັງສາມາດບັນລຸການຄວບຄຸມກ້ຽງໃນເຂດຄວາມໄວທັງຫມົດ, ເກືອບບໍ່ມີ oscillation, ຂະຫນາດນ້ອຍ, ປະສິດທິພາບສູງ, ການປະຫຍັດພະລັງງານ, ສຽງຕ່ໍາ, ບໍ່ມີຄວາມຮ້ອນ, ຊີວິດຍາວ.
1. ພະລັງງານຜົນຜະລິດສູງ.
2. ການດໍາເນີນງານ resonant ແລະ vibration-free.
3. ຕົວເຂົ້າລະຫັດກໍານົດຄວາມຖືກຕ້ອງແລະຄວາມລະອຽດ.
4. ປະສິດທິພາບສູງ, ການໂຫຼດແສງສະຫວ່າງສາມາດຢູ່ໃກ້ກັບ 90%.
5. ອັດຕາສ່ວນ torque-to-inertia ສູງ, ມັນສາມາດເລັ່ງການໂຫຼດໄດ້ໄວ.
6. ຄວາມສາມາດ "ສະຫງວນ", 2-3 ຄັ້ງຕໍ່ເນື່ອງພະລັງງານ, ໄລຍະເວລາສັ້ນ.
7. ດ້ວຍ "ສະຫງວນ" torque, 5-10 ເທົ່າຂອງ torque ການຈັດອັນດັບໃນໄລຍະສັ້ນ.
8. ມໍເຕີໄດ້ຖືກເກັບຮັກສາໄວ້ເຢັນແລະການບໍລິໂພກໃນປະຈຸບັນແມ່ນອັດຕາສ່ວນກັບການໂຫຼດ.
9. ສຽງງຽບສາມາດໄດ້ຍິນດ້ວຍຄວາມໄວສູງ.
10. ມີ torque ຄວາມໄວສູງຮັກສາ torque ຈັດອັນດັບຢູ່ທີ່ 90% ຂອງຄວາມໄວ NL.
ພາລາມິເຕີ
| ລາຍການ | ZLAC60ASM200 | ZLAC60ASM400 |
| ຂະໜາດ | ເນມາ 24 | ເນມາ 24 |
| ແຮງດັນສະໜອງ(V) | 36 | 48 |
| ລະດັບພະລັງງານ (W) | 200 | 400 |
| ແຮງບິດອັນດັບ (Nm) | 0.64 | 1.27 |
| ແຮງບິດສູງສຸດ (Nm) | 1.28 | 2.54 |
| ຄວາມໄວຄະແນນ (RPM) | 3000 | 3000 |
| ຄວາມໄວສູງສຸດ (RPM) | 3200 | 3200 |
| ອັນດັບປັດຈຸບັນ(A) | 7.5 | 11 |
| ກະແສສູງສຸດ(A) | 15 | 22 |
| ຄ່າສຳປະສິດຊ່ວງເວລາ(Nm/A) | 0.09 | 0.12 |
| ຄ່າສຳປະສິດ EMF ດ້ານຫຼັງ (V/RPM) | 5.5x10-3 | 7x10-3 |
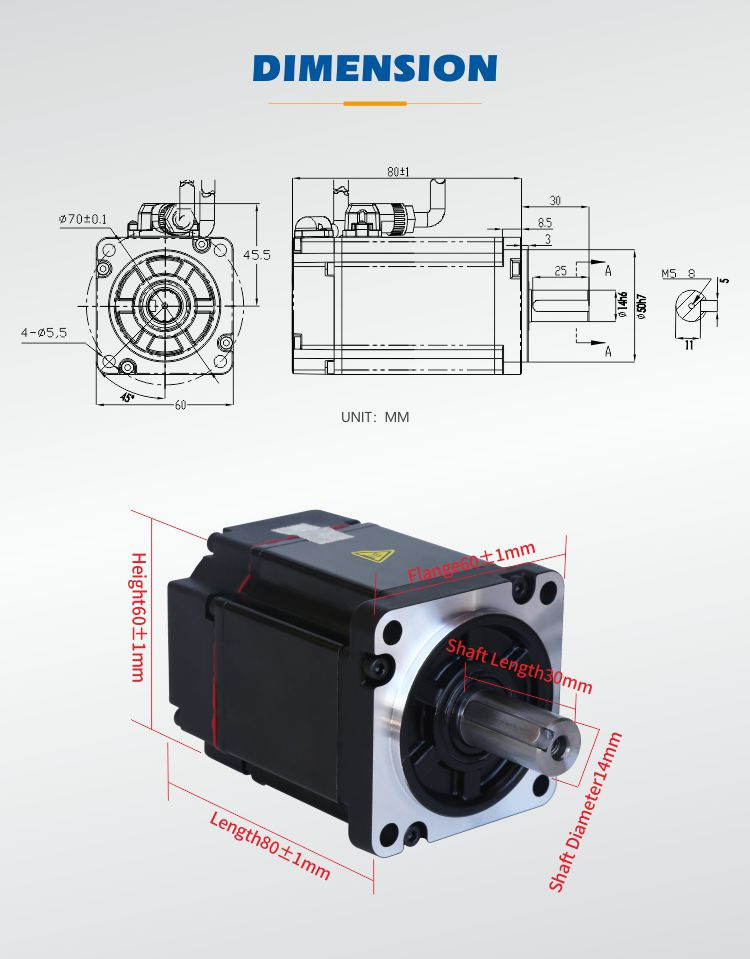
| ຂະໜາດໜ້າແປນ (ມມ) | 60 | 60 |
| ເສັ້ນຜ່າສູນກາງເພົາ(ມມ) | 14 | 14 |
| ການເຊື່ອມຕໍ່ Shaft | ກັບ keyway | ກັບ keyway |
| ຄວາມຍາວຂອງເພົາ(ມມ) | 30 | 30 |
| ຄວາມຍາວມໍເຕີ(ມມ) | 80 | 106 |
| ເສົາແມ່ເຫຼັກ (ຄູ່) | 5 | 5 |
| ຕົວເຂົ້າລະຫັດ(ສາຍ) | ແມ່ເຫຼັກ 2500 | ແມ່ເຫຼັກ 2500 |
| ລະດັບການປົກປ້ອງ | IP54 | IP54 |
| ນ້ຳໜັກ(kg) | 0.9 | 1.35 |
| ອຸນຫະພູມສະພາບແວດລ້ອມ (°C) | 0-40 | 0-40 |
| ຄວາມຊຸ່ມຊື່ນສະພາບແວດລ້ອມ (%) | 20-80 | 20-80 |
ຂະໜາດ

ຄໍາຮ້ອງສະຫມັກ

ການຫຸ້ມຫໍ່

ການຜະລິດ ແລະອຸປະກອນກວດກາ

ຄຸນສົມບັດ & ການຢັ້ງຢືນ

ຫ້ອງການ & ໂຮງງານ

ການຮ່ວມມື
