ZLTECH 24V-36V 5A DC electric Modbus RS485 ຕົວຄວບຄຸມມໍເຕີທີ່ບໍ່ມີ brushless ສໍາລັບ AGV


















ຟັງຊັນ ແລະໃຊ້
1 ໂໝດການປັບຄວາມໄວ
ລະບຽບຄວາມໄວການປ້ອນຂໍ້ມູນພາຍນອກ: ເຊື່ອມຕໍ່ 2 ປາຍຄົງທີ່ຂອງເຄື່ອງວັດແທກພະລັງງານພາຍນອກກັບພອດ GND ແລະພອດ +5v ຂອງໄດເວີຕາມລໍາດັບ.ເຊື່ອມຕໍ່ຈຸດສິ້ນສຸດການປັບຕົວກັບ SV end ເພື່ອໃຊ້ potentiometer ພາຍນອກ (10K ~ 50K) ເພື່ອປັບຄວາມໄວ, ຫຼືຜ່ານຫນ່ວຍຄວບຄຸມອື່ນໆ (ເຊັ່ນ: PLC, ໄມໂຄຄອມພິວເຕີຊິບດຽວ, ແລະອື່ນໆ) ແຮງດັນການປ້ອນຂໍ້ມູນ analog ກັບ SV end ເພື່ອຮັບຮູ້ກົດລະບຽບຄວາມໄວ. (ກ່ຽວຂ້ອງກັບ GND).ຊ່ວງແຮງດັນທີ່ຍອມຮັບຂອງພອດ SV ແມ່ນ DC OV ຫາ +5V, ແລະຄວາມໄວຂອງມໍເຕີທີ່ສອດຄ້ອງກັນແມ່ນ 0 ກັບຄວາມໄວການຈັດອັນດັບ.
2 ການຄວບຄຸມການແລ່ນ/ຢຸດຂອງມໍເຕີ (EN)
ການແລ່ນແລະການຢຸດຂອງມໍເຕີສາມາດຄວບຄຸມໄດ້ໂດຍການຄວບຄຸມການເປີດແລະປິດຂອງ terminal EN ທຽບກັບ GND.ໃນເວລາທີ່ terminal ແມ່ນ conductive, motor ຈະດໍາເນີນການ;ຖ້າບໍ່ດັ່ງນັ້ນ motor ຈະຢຸດ.ເມື່ອນໍາໃຊ້ເຄື່ອງແລ່ນ / ຢຸດເພື່ອຢຸດມໍເຕີ, ມໍເຕີຈະຢຸດຕາມທໍາມະຊາດ, ແລະກົດຫມາຍການເຄື່ອນໄຫວຂອງມັນແມ່ນກ່ຽວຂ້ອງກັບ inertia ຂອງການໂຫຼດ.
3 ການຄວບຄຸມການແລ່ນໄປໜ້າ/ປີ້ນມໍເຕີ (F/R)
ທິດທາງແລ່ນຂອງມໍເຕີສາມາດຄວບຄຸມໄດ້ໂດຍການຄວບຄຸມການເປີດ / ປິດຂອງ terminal F / R ແລະ terminal GND.ເມື່ອ F/R ແລະ terminal GND ບໍ່ conductive, motor ຈະແລ່ນຕາມເຂັມໂມງ (ຈາກຂ້າງ motor shaft), ຖ້າບໍ່ດັ່ງນັ້ນ, motor ຈະແລ່ນ counterclockwise.
4 ຄົນຂັບລົດລົ້ມເຫລວ
ເມື່ອ overvoltage ຫຼື over-current ເກີດຂຶ້ນພາຍໃນໄດເວີ, ຄົນຂັບຈະເຂົ້າສູ່ສະຖານະປ້ອງກັນແລະຢຸດການເຮັດວຽກອັດຕະໂນມັດ, ມໍເຕີຈະຢຸດ, ແລະໄຟສີຟ້າຢູ່ຄົນຂັບຈະຫມົດໄປ.ໄດເວີຈະປ່ອຍສັນຍານເຕືອນເມື່ອເຄື່ອງໃຊ້ໄຟຟ້າຖືກຣີເຊັດ (ເຊັ່ນ: EN ຖືກຕັດການເຊື່ອມຕໍ່ຈາກ GND) ຫຼືປິດເຄື່ອງ.ເມື່ອຄວາມຜິດນີ້ເກີດຂື້ນ, ກະລຸນາກວດເບິ່ງການເຊື່ອມຕໍ່ສາຍໄຟດ້ວຍການໂຫຼດຂອງມໍເຕີຫຼືມໍເຕີ.
5 ພອດການສື່ສານ RS485
ໂຫມດການສື່ສານຂອງຜູ້ຂັບຂີ່ນໍາໃຊ້ມາດຕະຖານ Modbus protocol, ເຊິ່ງສອດຄ່ອງກັບມາດຕະຖານແຫ່ງຊາດ GB/T 19582.1-2008.ການນໍາໃຊ້ RS485-based 2-wire serial ເຊື່ອມຕໍ່ການສື່ສານ, ການໂຕ້ຕອບທາງດ້ານຮ່າງກາຍນໍາໃຊ້ພອດສາຍ 3-pin ທໍາມະດາ (A+, GND, B-), ແລະການເຊື່ອມຕໍ່ serial ແມ່ນສະດວກຫຼາຍ.
ພາລາມິເຕີ
| ຄົນຂັບລົດ | ZLDBL4005S |
| ແຮງດັນຂາເຂົ້າ(V) | 24V-36V DC |
| ກະແສໄຟອອກ(A) | 5 |
| ວິທີການຄວບຄຸມ | Modbus RS485 |
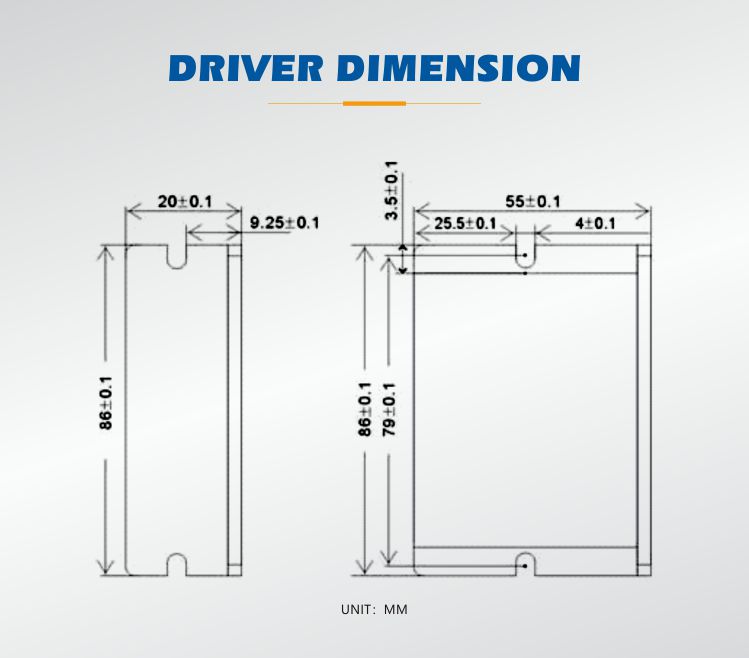
| ຂະໜາດ(ມມ) | 86*55*20ມມ |
| ນ້ຳໜັກ(kg) | 0.1 |
ຂະໜາດ
ຄໍາຮ້ອງສະຫມັກ

ການຫຸ້ມຫໍ່

ການຜະລິດ ແລະອຸປະກອນກວດກາ

ຄຸນສົມບັດ & ການຢັ້ງຢືນ

ຫ້ອງການ & ໂຮງງານ

ການຮ່ວມມື

ປະເພດຜະລິດຕະພັນ
-

2S86 ZLTECH 86 ຊຸດ DC 36V 48V AC 27V-75V clo...
-

ZLTECH 24V-48V 30A Canbus Modbus ສອງຊ່ອງ D ...
-

ZLTECH 15inch 200kg DC DC brushless hub motor ມີ ...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V ປະສົມປະສານຂັ້ນຕອນ ...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 57mm Nema23 ປະສົມປະສານມໍເຕີຂັ້ນຕອນທີ່ມີ d...





